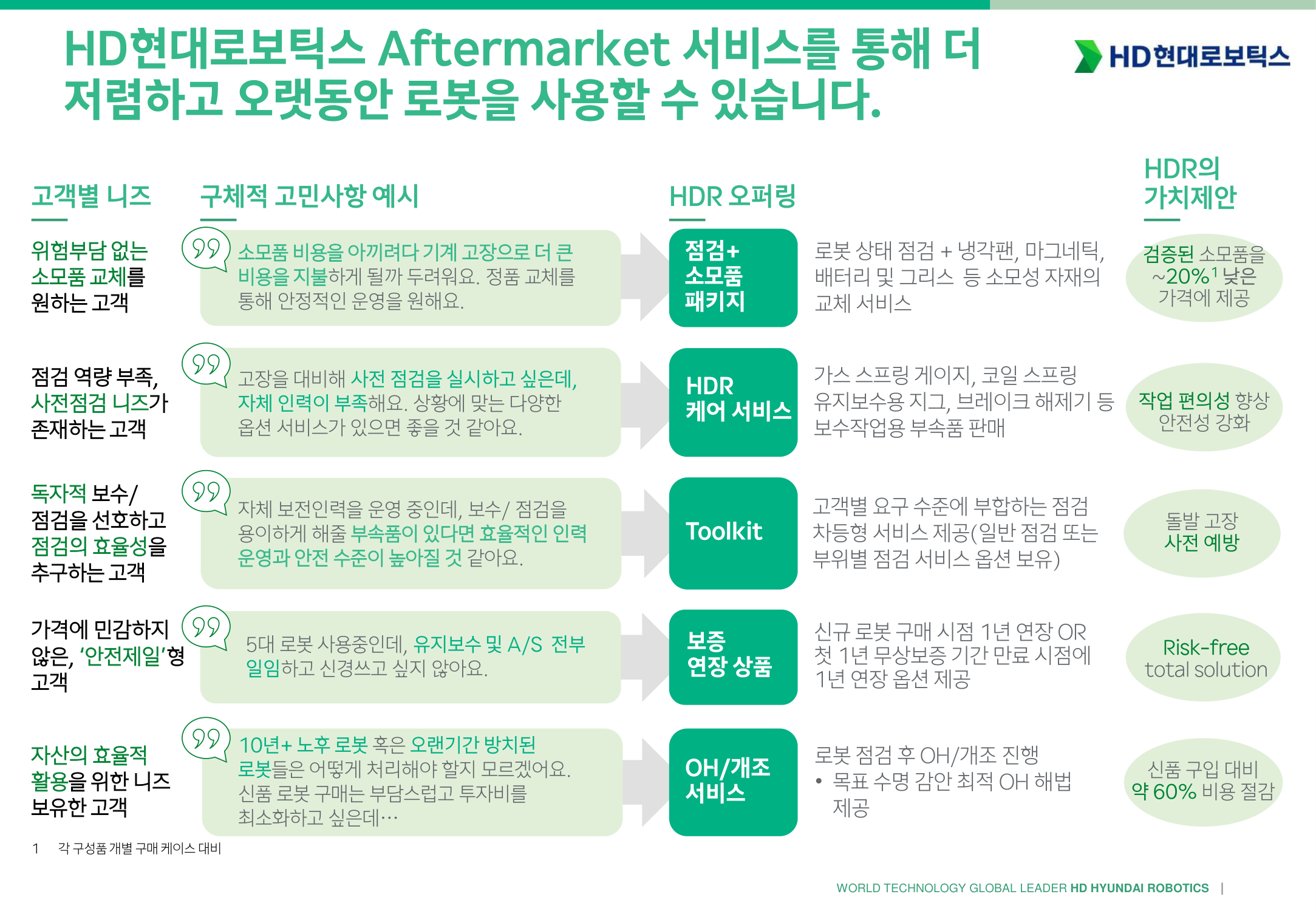
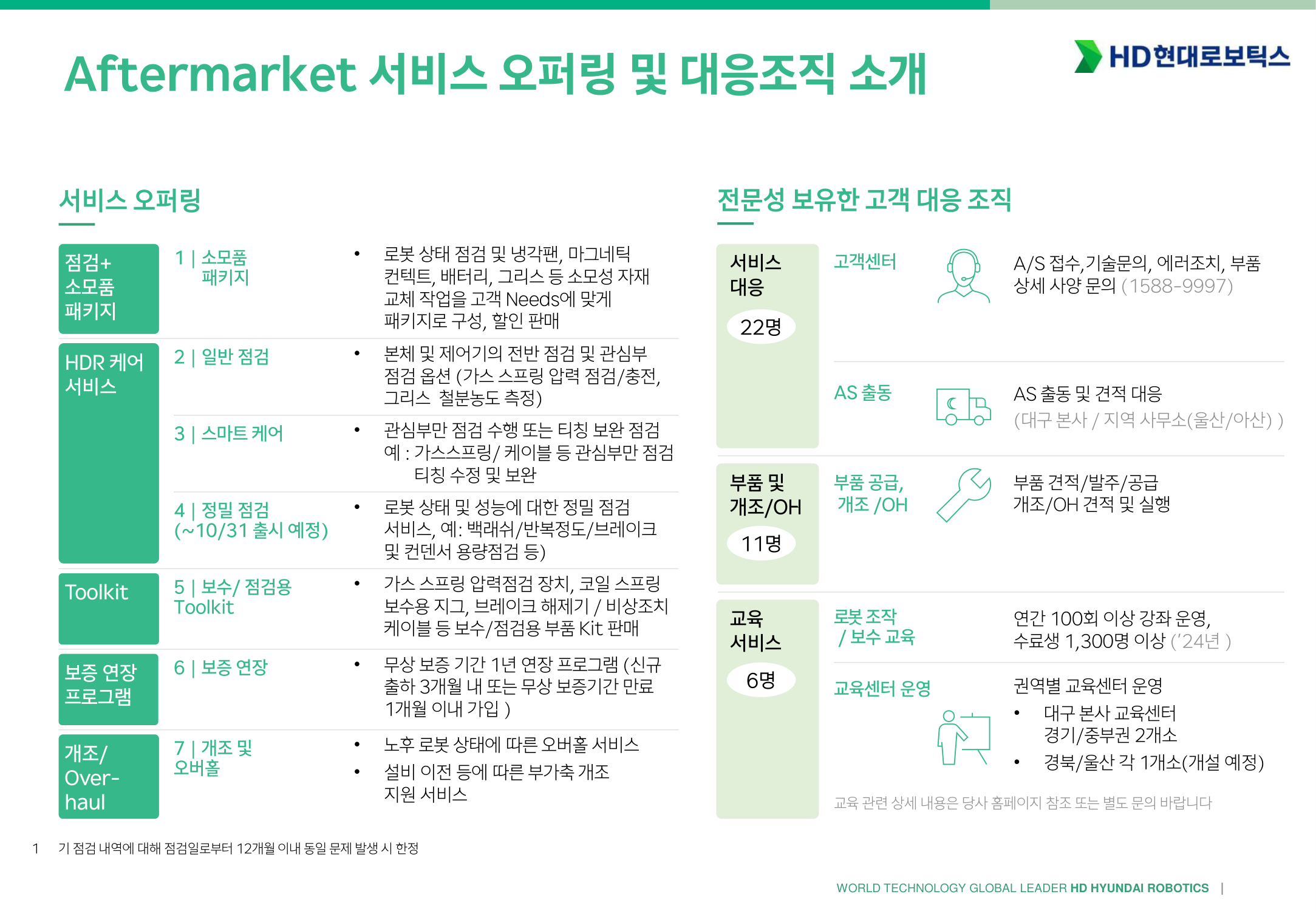
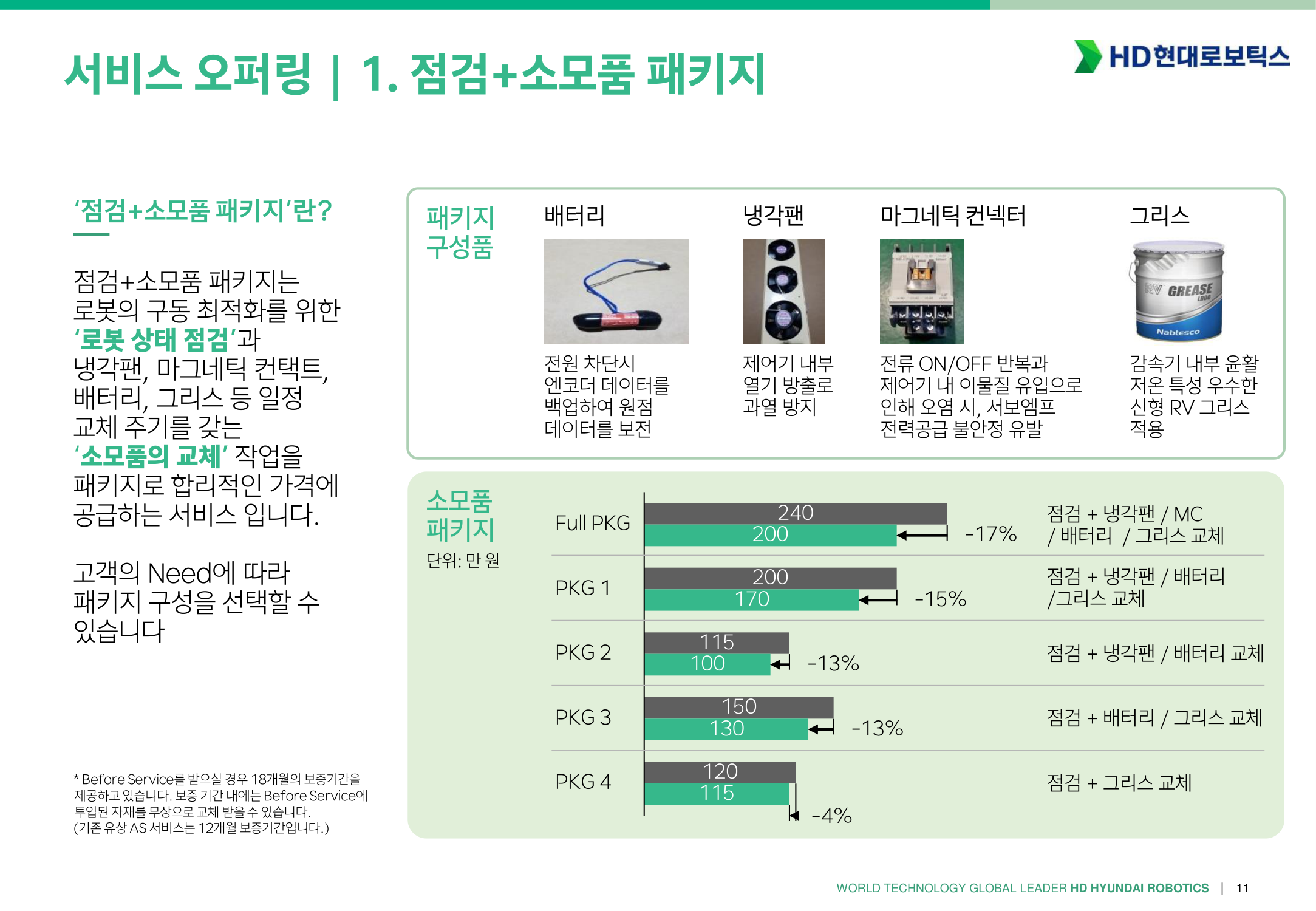
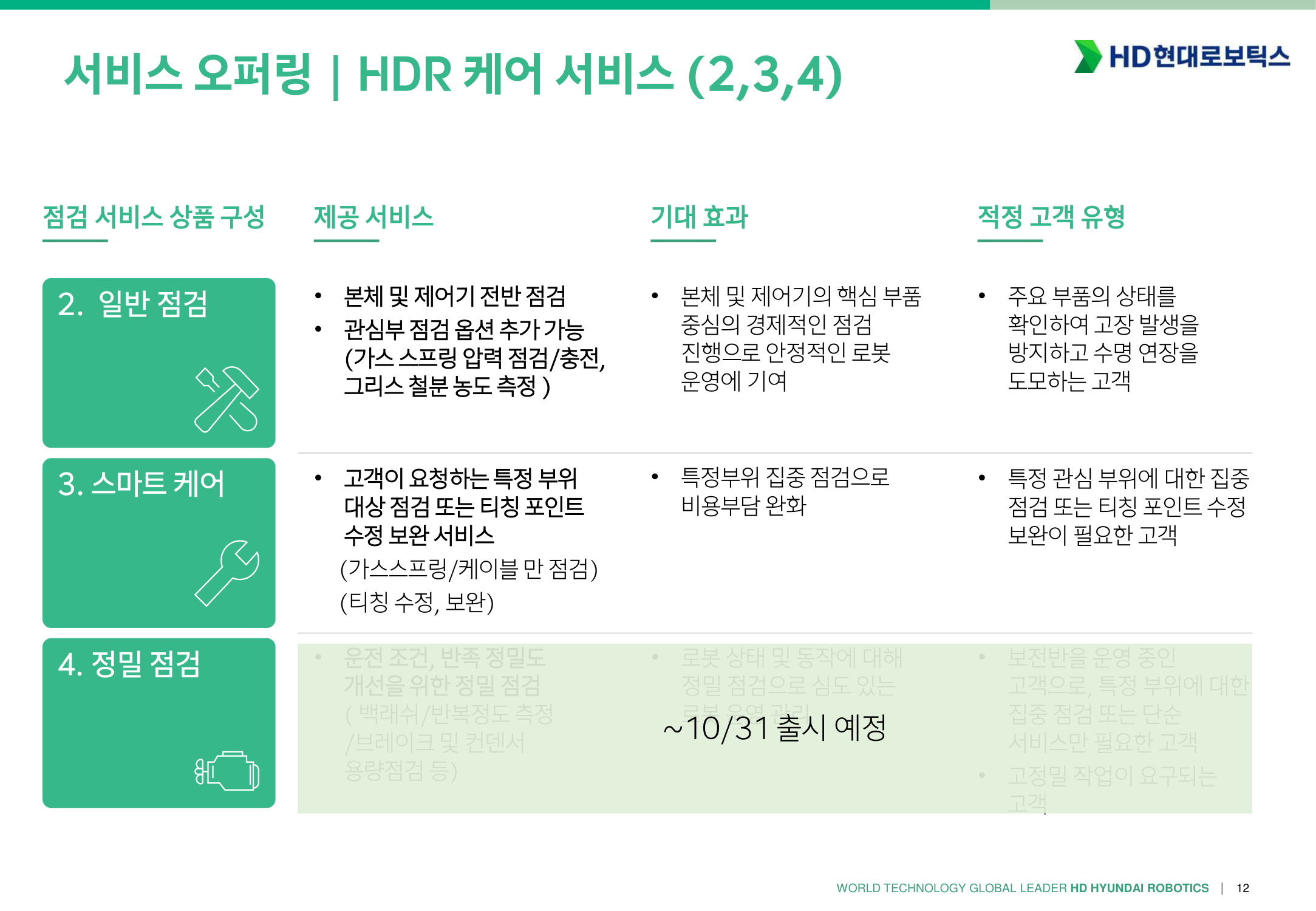
HD현대로보틱스의 Aftermarket 서비스를 다음과 같이 안내드립니다.
- 소개자료 PDF파일 : 다운로드


기본적으로 단종 후 8년간 부품 공급 가능 및 이후 2년간 제한적인 부품 공급 및 AS 가능
단종 시점에서 연차 경과에 따라서 납기가 길어지고, 상황에 따라서 공급이 불가능한 경우도 발생할 수 있음.
| 순 | 모델명 | 단종 | 주요부품 공급가능기한 |
|---|---|---|---|
| 1 | Hi4, Hi4a | 2010년 | 보유 재고에 한해 공급 가능, 별도 문의 |
| 2 | Hi5 | 2015년 | 2025년까지 |
| 3 | Hi5a-N | 2021년 | 2031년까지 |
| 4 | Hi5a-S | 2024년 | 2034년까지 |
주요부품: PCB류, 서보엠프, TP
| 순 | 모델명 | 단종 | 주요부품 공급가능기한 |
|---|---|---|---|
| 1 | HR, HX (Hi4, Hi4a) | 2010년 | 보유 재고에 한해 공급 가능, 별도 문의 |
| 2 | HX300, HX200L (Hi5) | 2015년 | 2025년까지 |
| 3 | HA006, HA020, HA010L, HA006A, HA020W, HA010LW | 2015년 | 2025년까지 |
| 4 | HS165, HS165S, HS200, HS150L, HS165D | 2016년 | 2026년까지 |
| 5 | HS200S | 2019년 | 2029년까지 |
| 6 | HH130L, HH100SL, YS140, HA006E | 2022년 | 2032년까지 |
| 7 | HX400S | 2023년 | 2033년까지 |
| 8 | HS260, HX500 | 2024년 | 2034년까지 |
| 9 | HA006B, HH012A, HH020, HH010L, HA006L, HH020L | 2025년 | 2035년까지 |
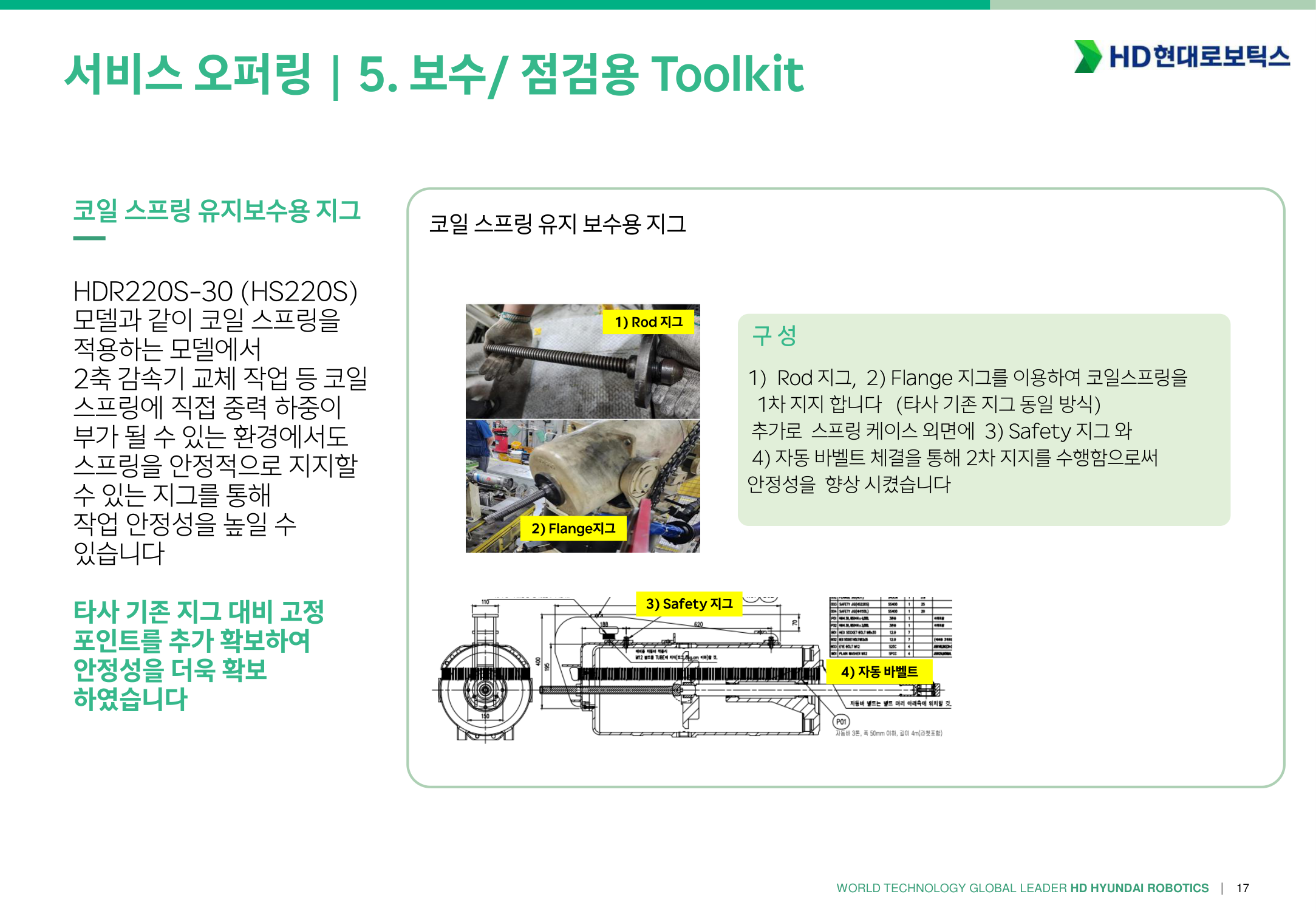
주요부품: 모터, 감속기, 외배케이블, WRIST ASSY, Balance Spring
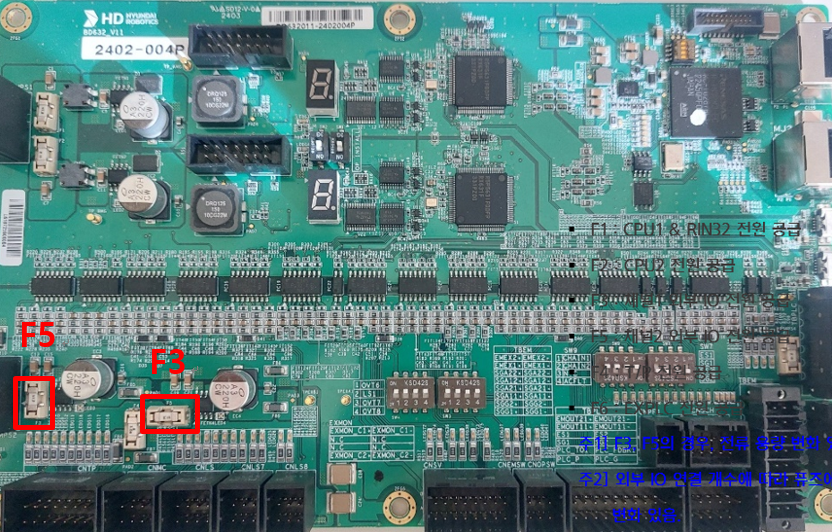
외부 배선설치를 하기 전, 주전원을 차단한 상태에서 작업하시기 바랍니다.
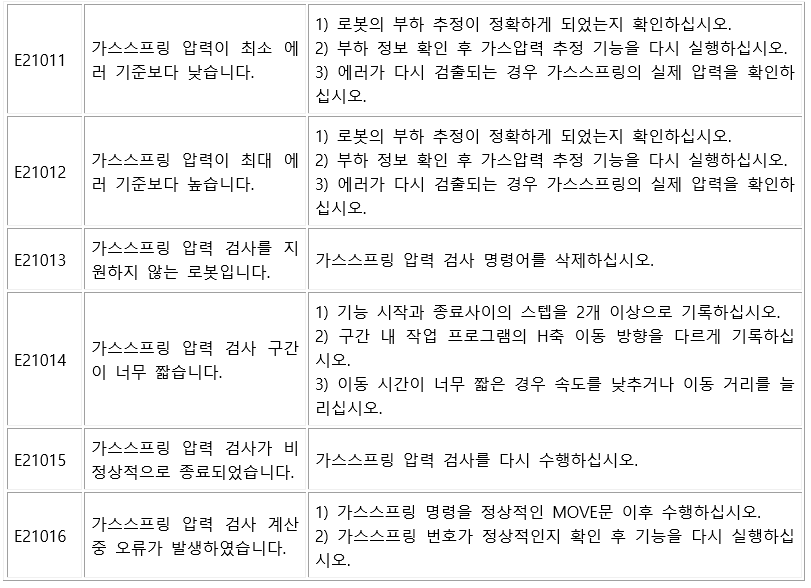
외부 비상정지를 설치하여 사용할 경우에는 비상정지가 정상적으로 작동되는지 확인 후 로봇을 가동시켜야 합니다. 또한 비상정지 입력이 무효화가 되어 있는지 확인하십시오. 이는 작업자의 안전을 위하여 반드시 필요한 사전조치입니다.
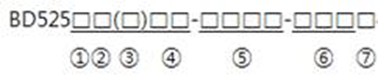
① Master Channel 통신 종류
② Slave Channel 통신 종류
③ <u>CC-Link IE사양일 경우에만 한자리 추가 (이외 추가 안함)</u>
④ PCB Version
⑤ 년/월
⑥ Lot No.
⑦ 식별 코드 (필요 시 부가)
상기 ①, ② 작성 관련하여, 실물 구성이 Master만 2개 장착이라면, Slave 자리(②)에 숫자 2작성,
실물 구성이 Slave만 2ro 장착이라면, Master 자리(①)에 숫자 2작성 (CC-Link IE는 전용자리(③)가 있으므로 제외)
| BD525PP PROFINET IO Master&Slave |
| BD525BB PROFIBUS-DP Master&Slave |
| BD525CC CC-Link Master&Slave |
| BD525DD DeviceNet Master&Slace |
| BD525EX EtherNet/IP Master |
| BD525PX PROFINET IO Master |
| BD525BX PROFIBUS-DP Master |
| BD525CX CC-Link Master |
| BD525DX DeviceNet Master |
| BD525TX EtherCAT Master |
| BD525XE EtherNet/IP Slave |
| BD525XP PROFINET IO Slave |
| BD525XB PROFIBUS-DP Slave |
| BD525XC CC-Link Slave |
| BD525XD DeviceNet Slave |
| BD525XT EtherCAT Slave |
| BD525EXS EtherNet/IP Master + CC-Link IE Slave |
| BD525XES EtherNet/IP Slave + CC-Link IE Slave |
| BD525XXS + CC-Link IE Slave |
| 통신사양 | 보드명(M/S, /S, M/) | H/W | S/W |
|---|---|---|---|
| PROFIBUS-DP | BD525BB,BD525XB,BD525BX | BD525+PROFIBUS 서브 모듈 | 상이 |
| 디바이스넷 | BD525DD,BD525XD,BD525DX | BD525+디바이스넷서브 모듈 | |
| CC-Link | BD525XC | BD525+CC-Link서브 모듈 | |
| CC-LinkIE +EtherNetIP 마스터 | BD525EXS | BD525+AB4788-B | |
| EtherNetIP | BD525EE,BD525XE,BD525EX | BD525 | |
| PROFINET-IO | BD525PP,BD525XP,BD525PX | ||
| EtherCAT | BD525TT,BD525XT,BD525TX |
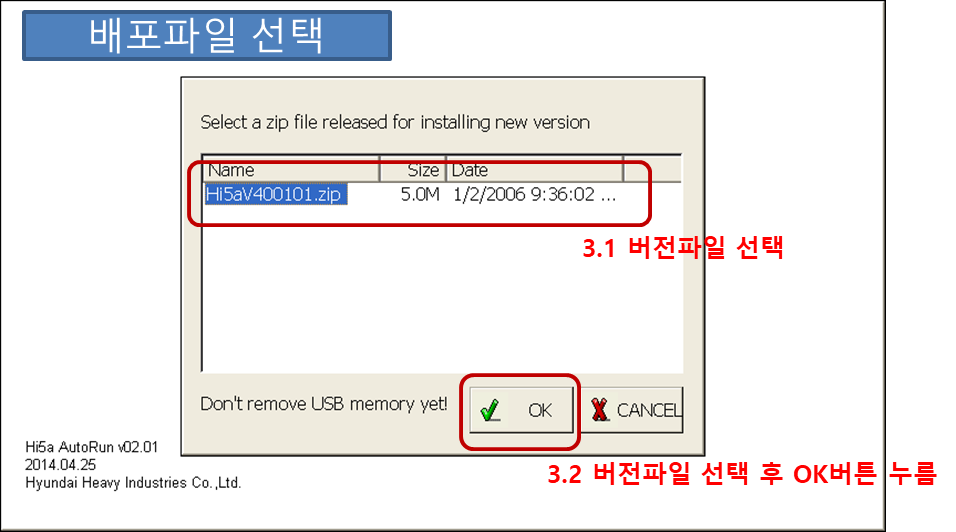
是的) Hi5aV402600.zip
控制器型号(Hi5a) + V + 主要酒吧(40) + 次要版本(26) + 构建修订版(00)
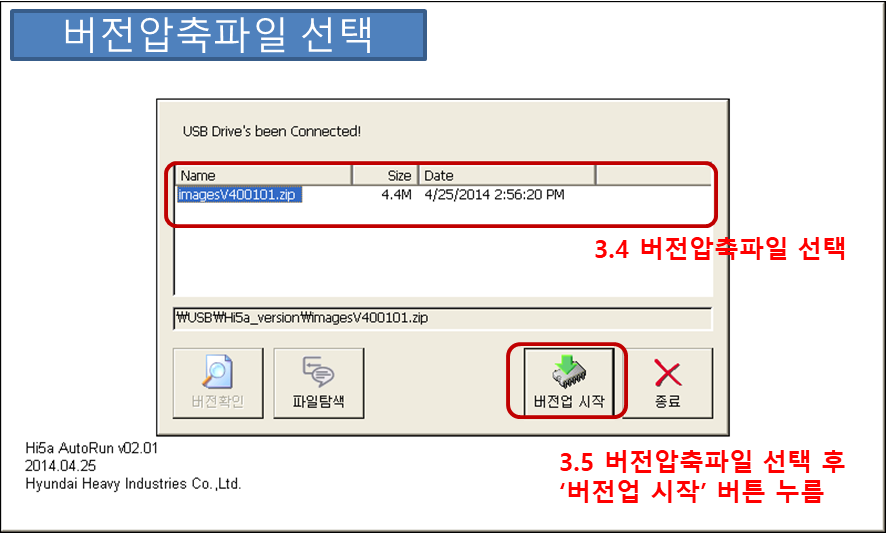
\USB\Hi5a_rel
分发文件 : Hi5aV402600.zip
EX) \USB\Hi5a_rel\Hi5aV402600.zip
警告
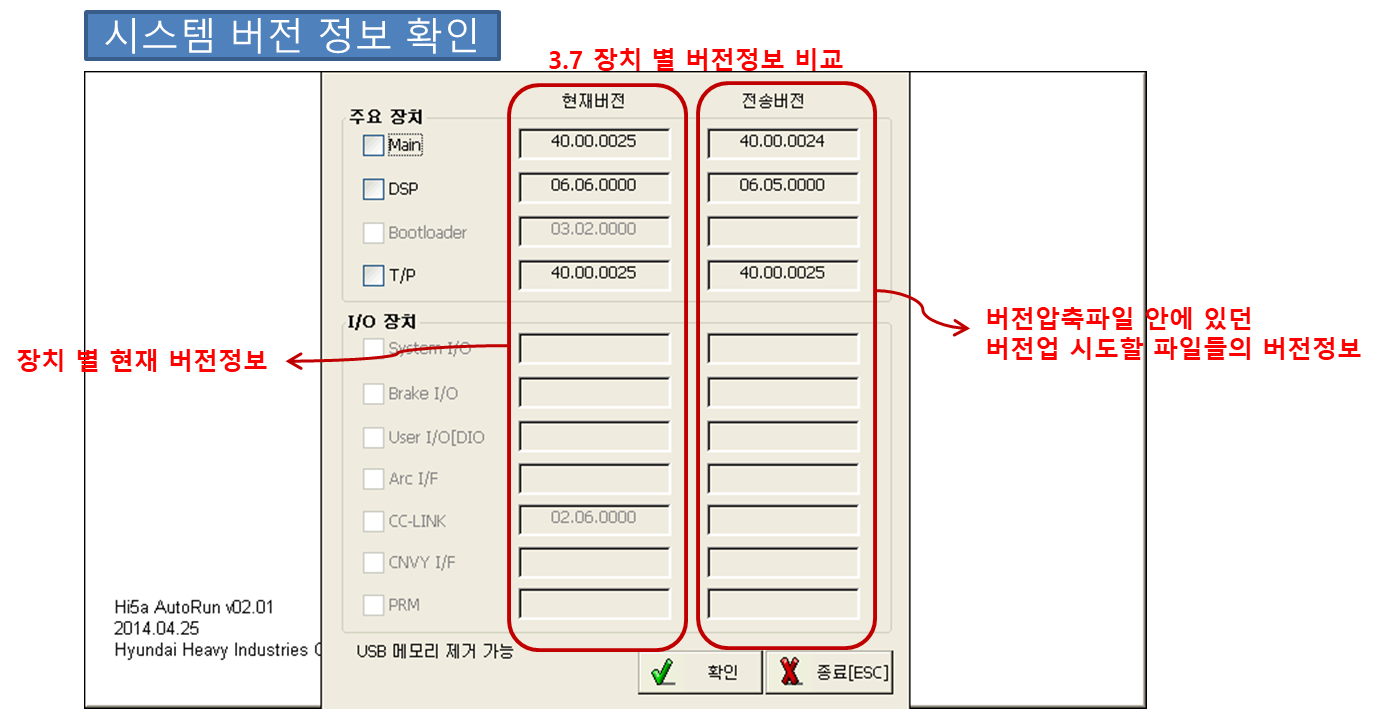
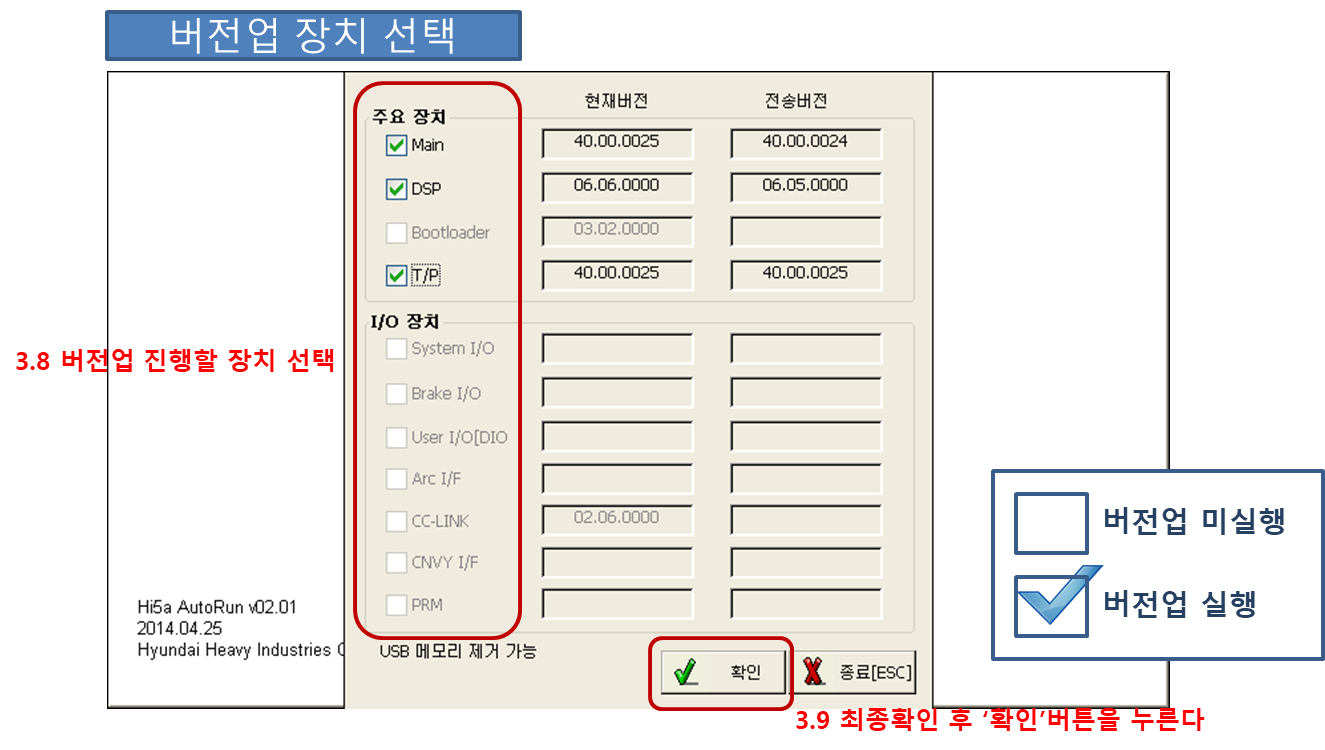
(您可以只升级您想要的部分。.)

分配 | TP520 | TP530 |
RAM | DDR2 256Mbyte (400MHz) | DDR3 1Gbyte (933MHz) |
记忆 | NAND Flash 1GByte | eMMC Flash 8GByte |
OS | Window CE 6.0 (TP511 与 TP520 具有相同的软件) | Window Embedded Compact |
※ TP520和TP530外观相同.

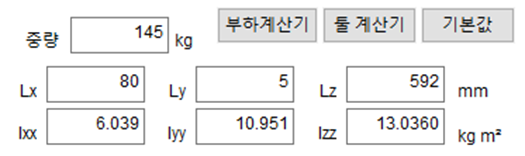
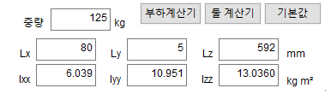
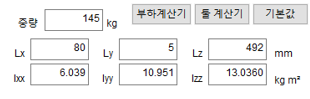
机器人的有效负载(以下型号-165Kg)是指机器人可以承载和工作的重量。
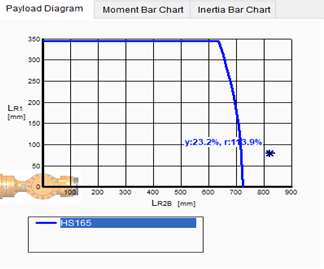
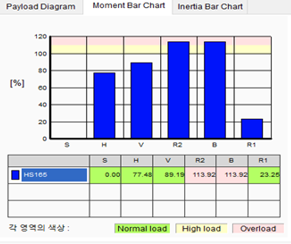
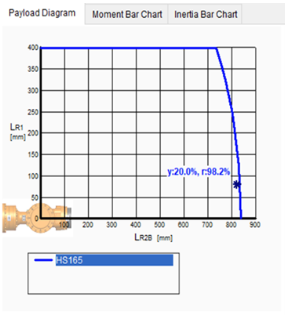
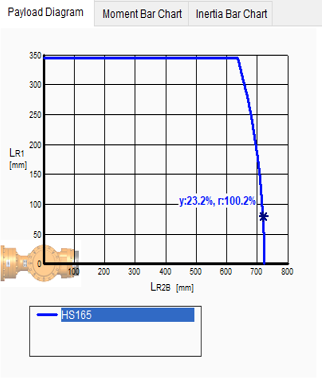
即使有效负载为 165Kg,重心距基准点越远,扭矩越大,允许有效负载越小。(见下图)
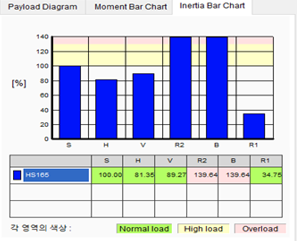
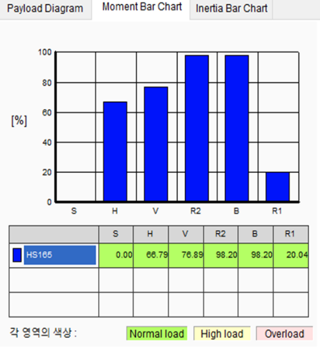
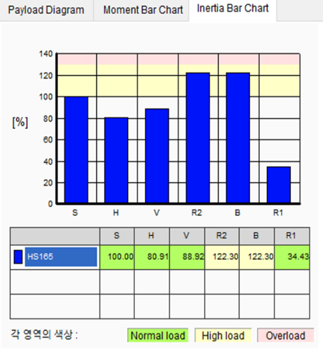
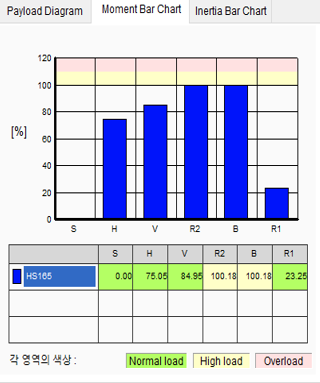
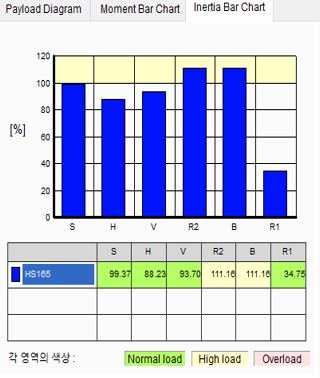
即使基于重心的扭矩值相同,转动惯量也会根据速度而增加。
换句话说,即使工具或工件很轻,如果重心移离参考点,容许负载也会迅速减小。
如果转动惯量或扭矩超过,建议尽可能缩短距参考点的距离
机器人的允许有效负载与工具重量成正比,与距离的平方成反比.

看起来安装小于有效负载的工具不会有问题,但工具中心和参考点之间的距离似乎很长。
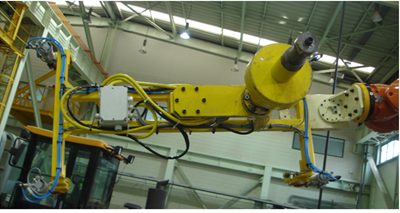
(机器人:HS165,工具重量:145Kg)
EUREKA 114是为了解决VIGO RE 0的初期噪音问题而开发的 ,是与VIGO润滑脂相比初期试验噪音大幅 改善的产品。但请注意,在同一减速机中将上述润滑脂混合在一起可能会产生一些噪音。
本公司机器人所使用的减速机润滑脂如下。
如果您使用混合润滑脂,请使用以下方法更换。
参考文献1。油脂罐

VIGO RE0

EUREKA 114
参考文献2。油脂填充贴纸
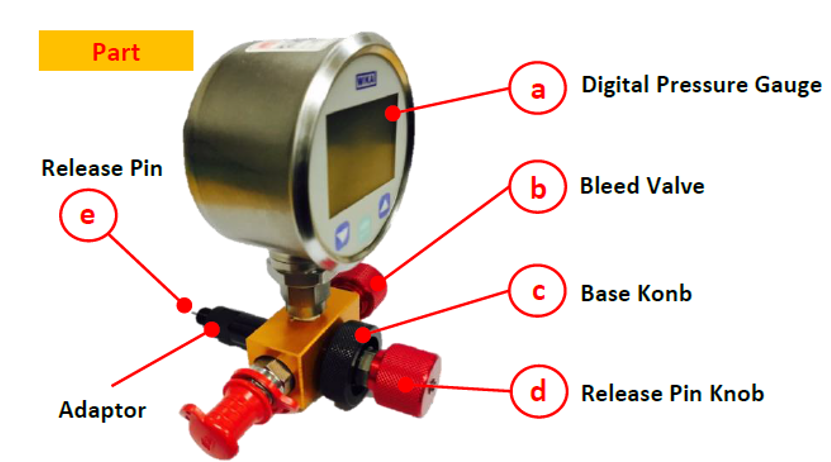
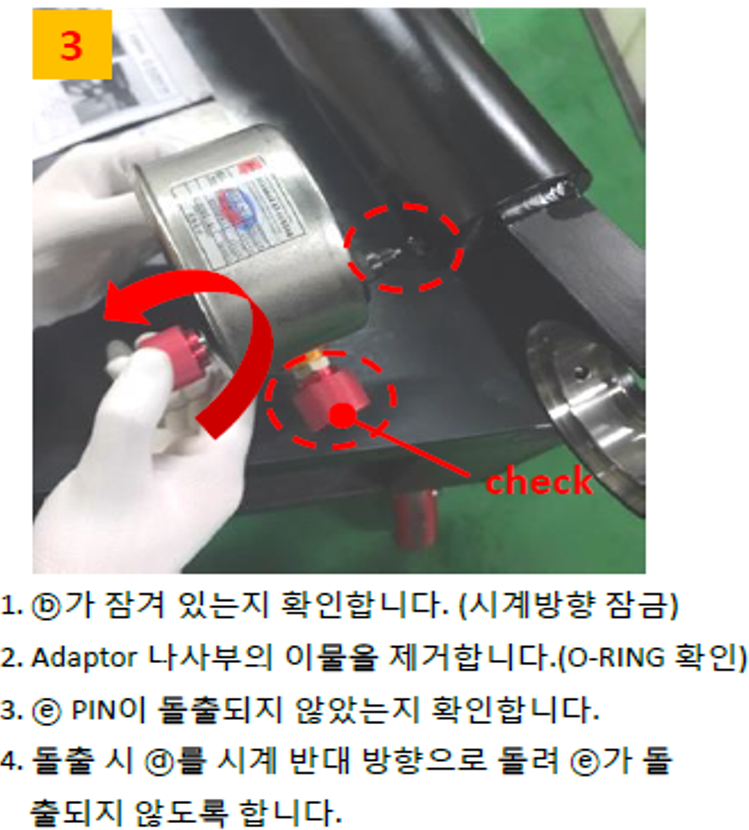
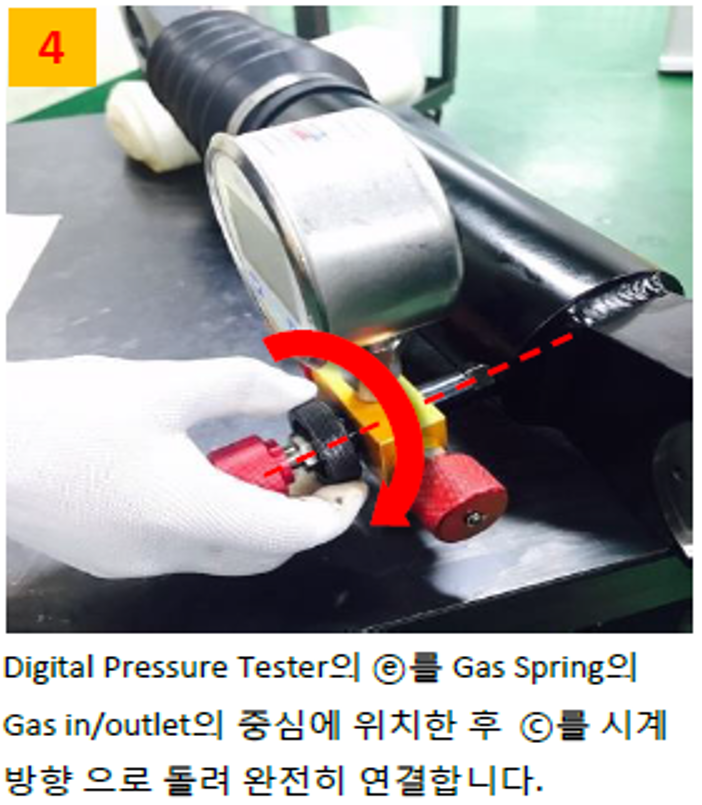
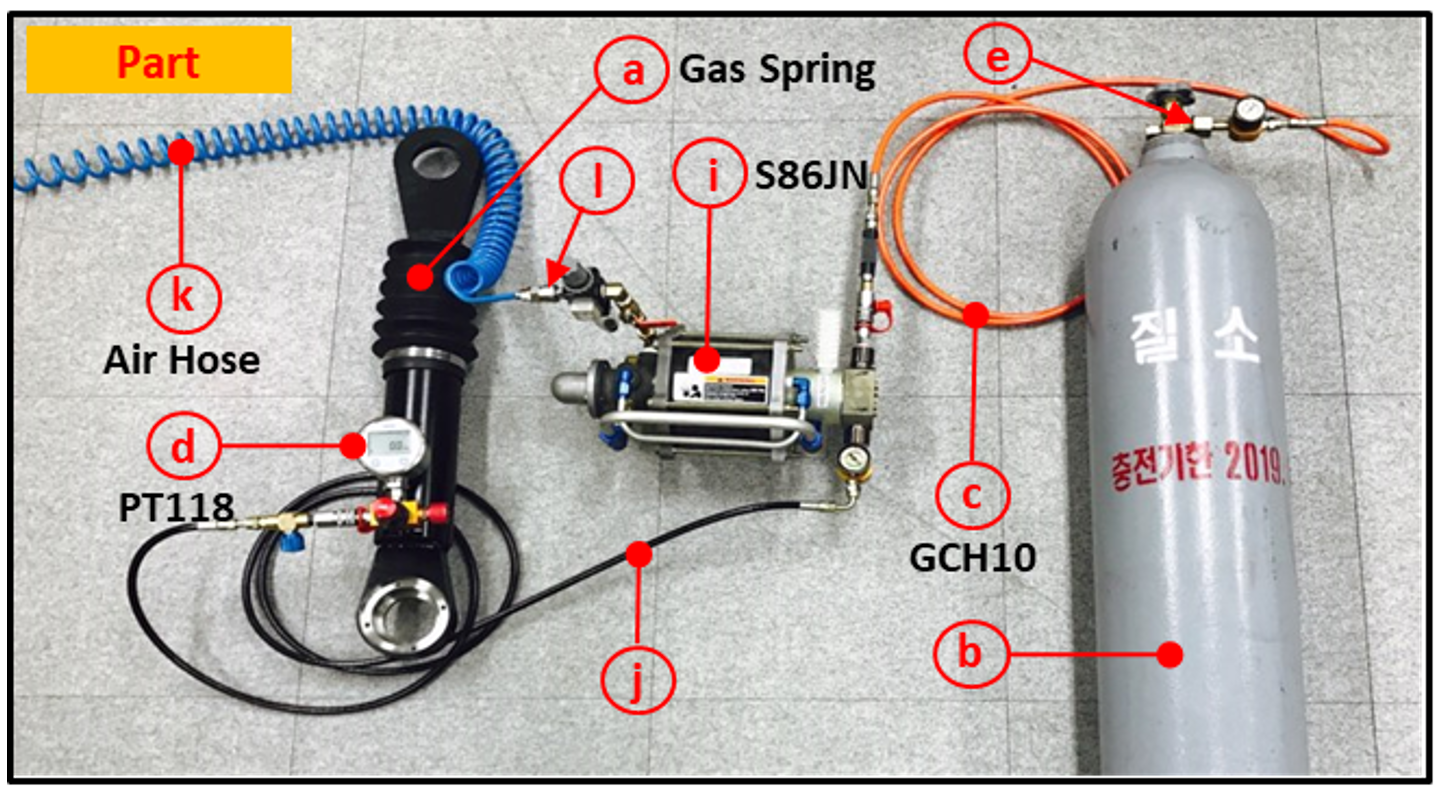
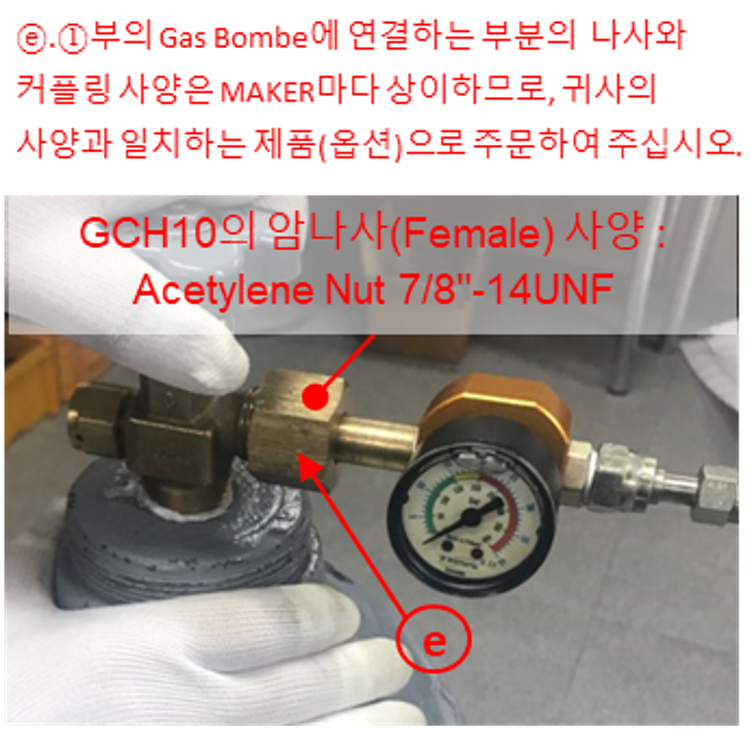
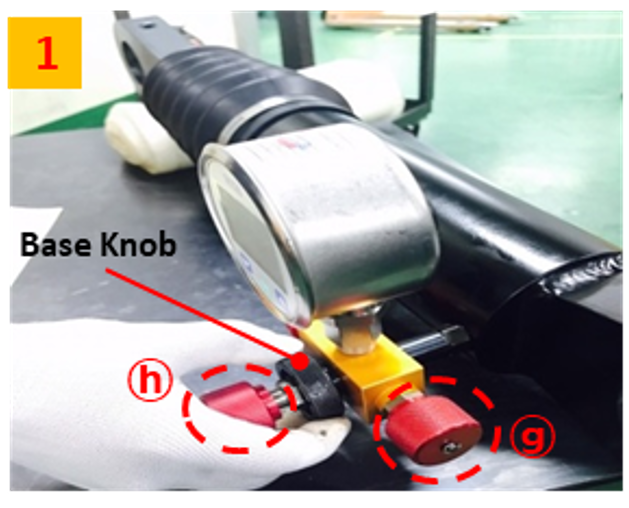
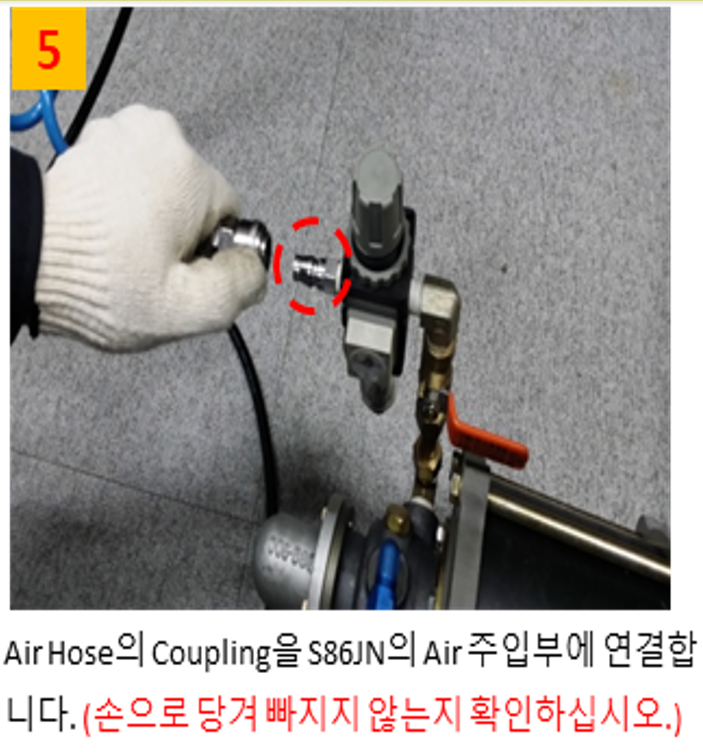
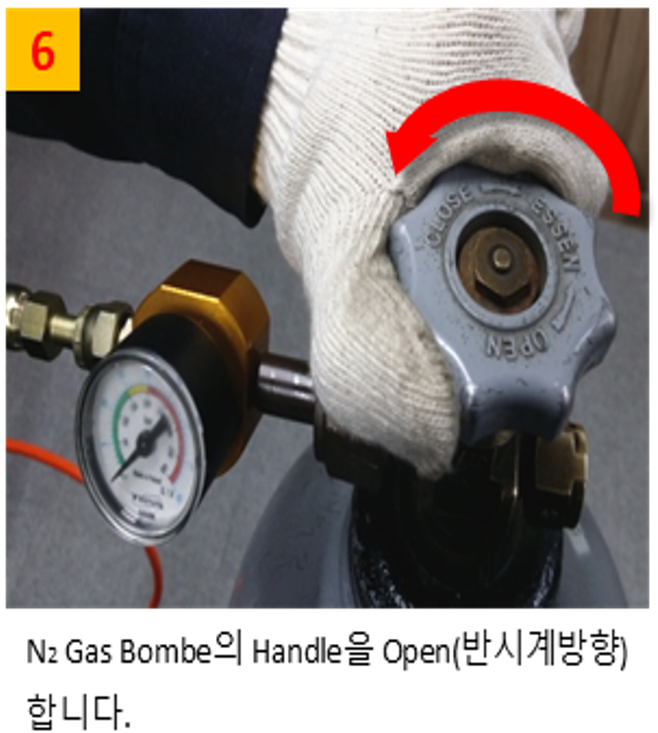
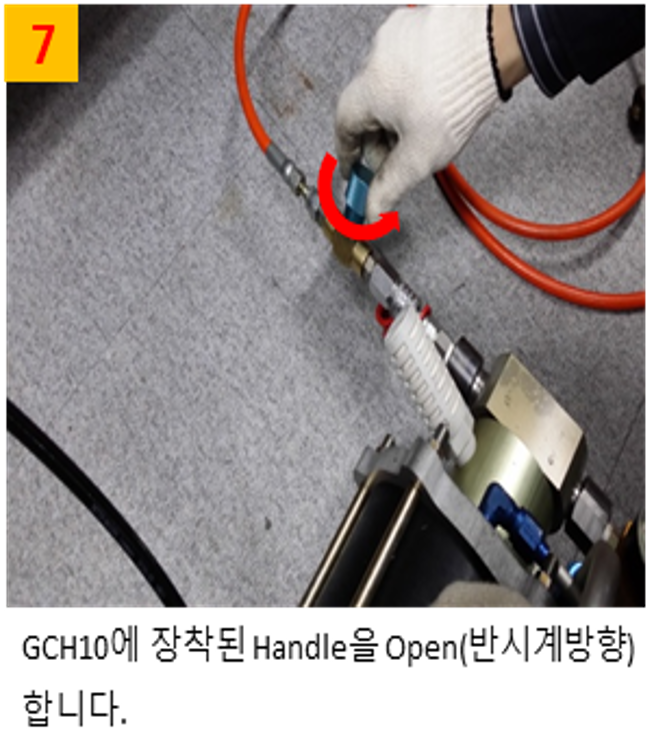
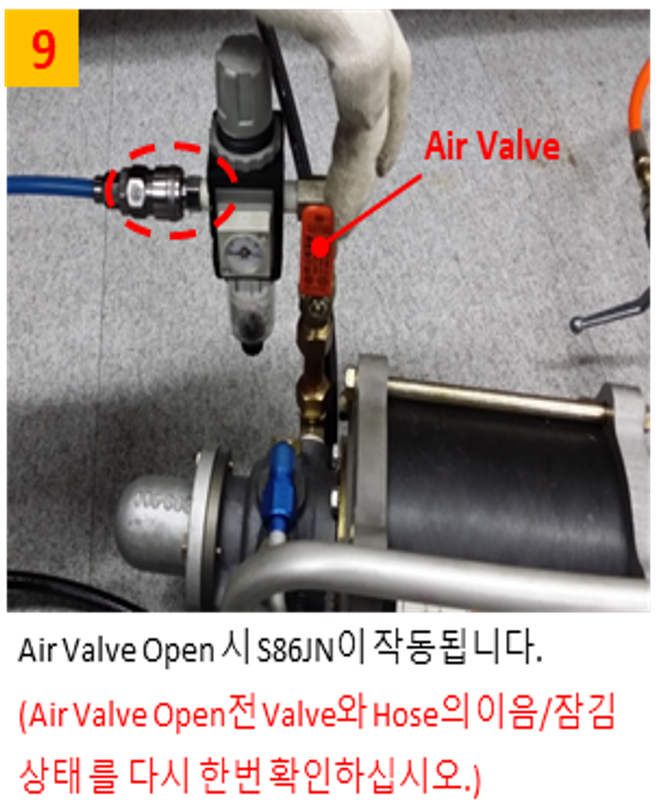
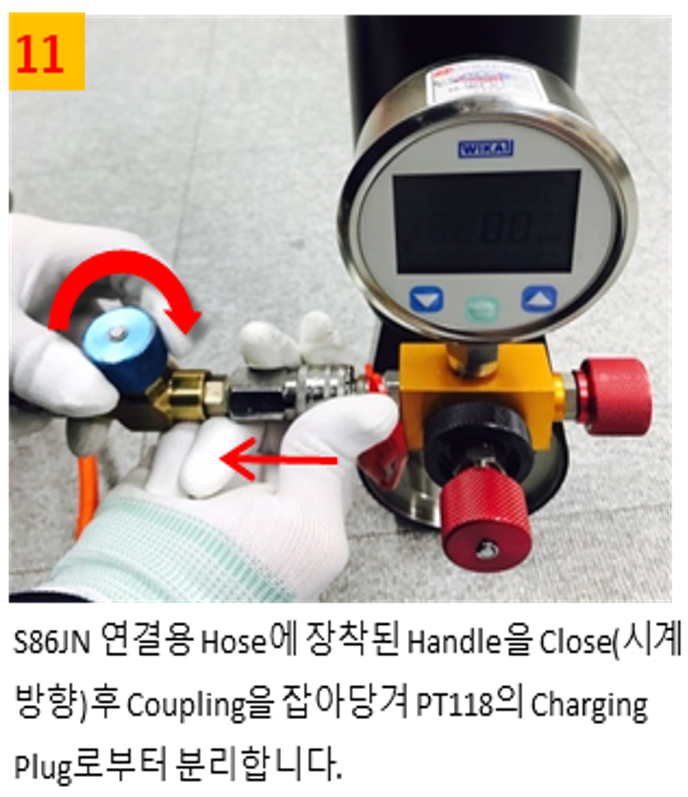
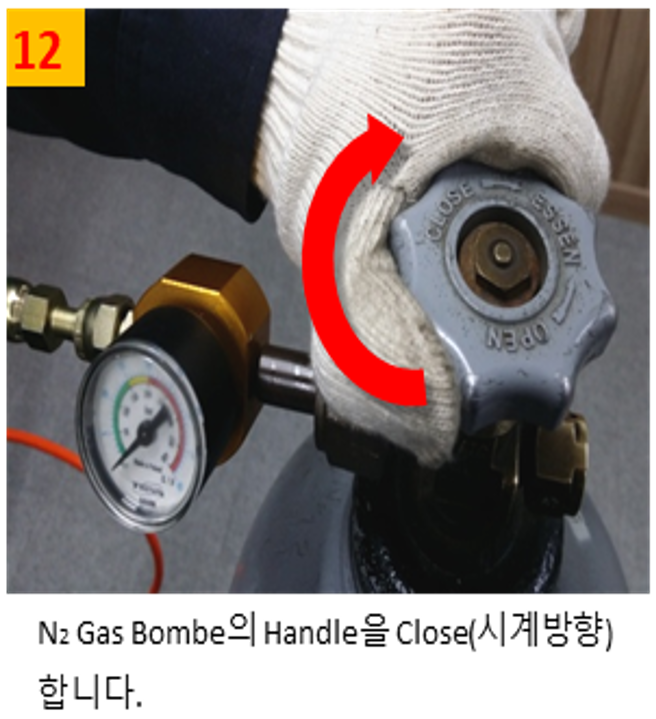
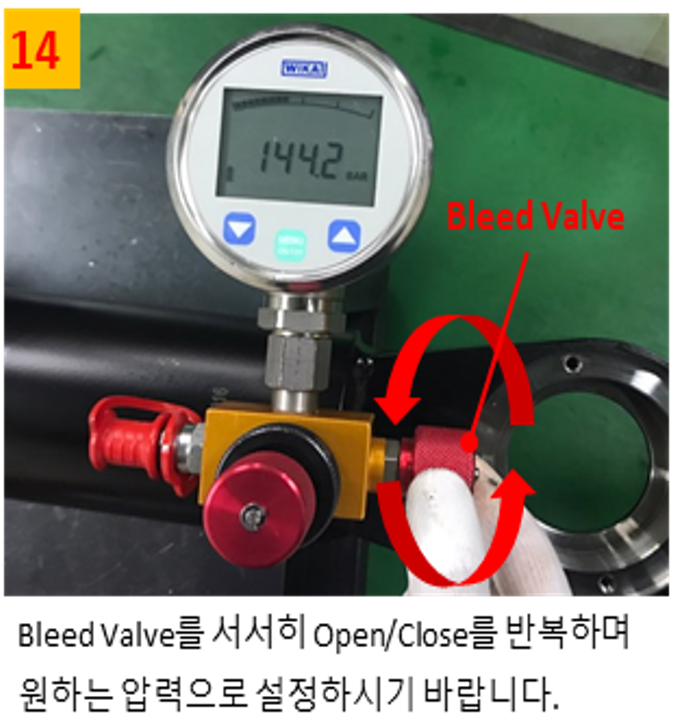
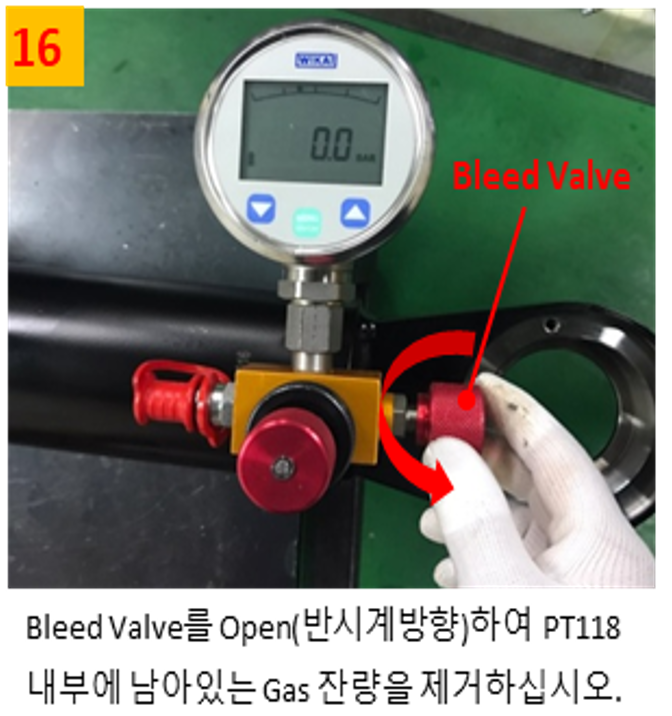
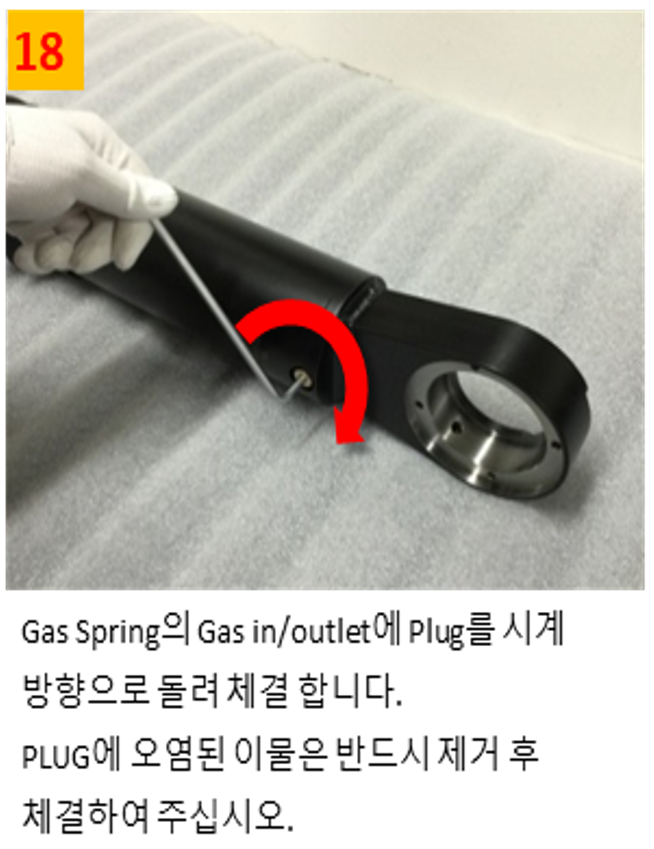
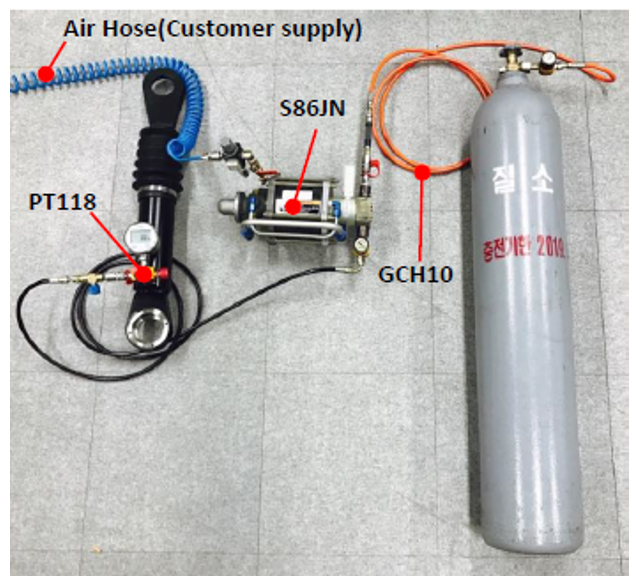 气弹簧填充套件
气弹簧填充套件
 (数字压力表)
(数字压力表)
 (压力喷射增压器)
(压力喷射增压器)