了解容许扭矩和转动惯量
机器人的有效负载(以下型号-165Kg)是指机器人可以承载和工作的重量。
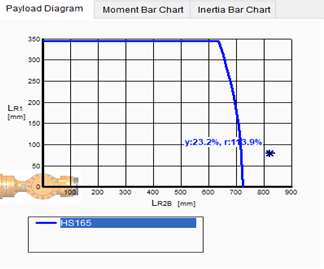
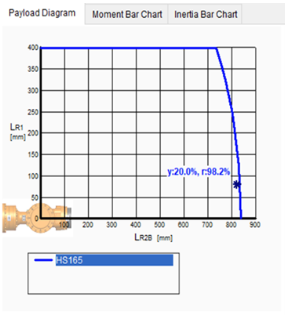
即使有效负载为 165Kg,重心距基准点越远,扭矩越大,允许有效负载越小。(见下图)
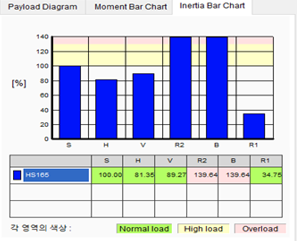
即使基于重心的扭矩值相同,转动惯量也会根据速度而增加。
换句话说,即使工具或工件很轻,如果重心移离参考点,容许负载也会迅速减小。
如果转动惯量或扭矩超过,建议尽可能缩短距参考点的距离
机器人的允许有效负载与工具重量成正比,与距离的平方成反比.

过多的用例
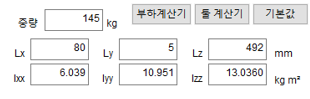
适用机器人 : HS165 (有效载荷 165Kg), 工具 (145Kg)
看起来安装小于有效负载的工具不会有问题,但工具中心和参考点之间的距离似乎很长。
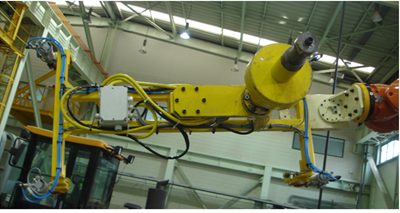
(机器人:HS165,工具重量:145Kg)
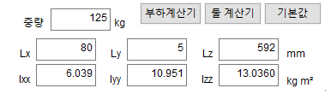
求工具质心的距离和惯量。
- 使用机器人负载估算软件
- 使用工具中的 3D 建模数据
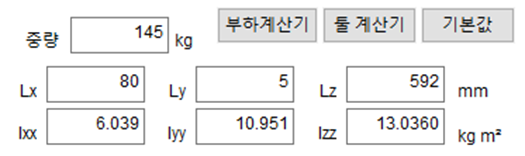
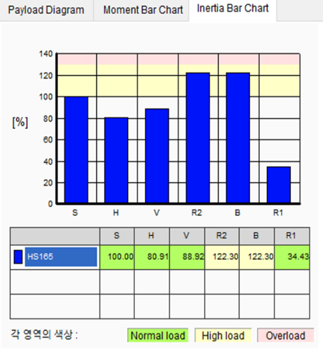
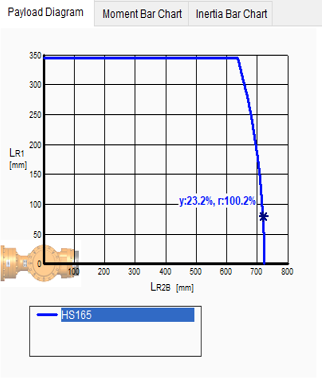
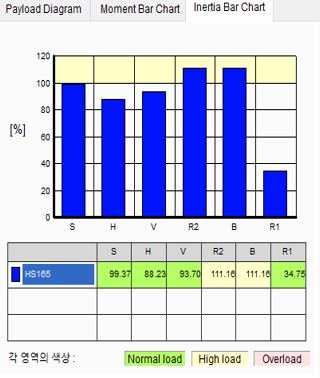
荷载计算应用结果如下。
- 重量:超出使用范围。
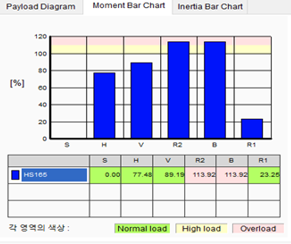
- 扭矩:4,5轴不可用
- 惯量:不适用于第 4 轴和第 5 轴
负载超过时如何改进
- 如果负载过大,有办法减轻工具重量或 减小到工具重心的距离。
- 缩短距离更有效。当通过以下两种方式进行改进时,如果仅减轻重量,则过剩惯性不会得到改善。
- 负载计算使用我们的负载分析程序HRLoad。 (HRLoad 下载)
减肥时
- 工具重量从 145 公斤减少到 125 公斤,减少 20 公斤
- HRLoad 分析
- 重量在容许范围内(在边界上)
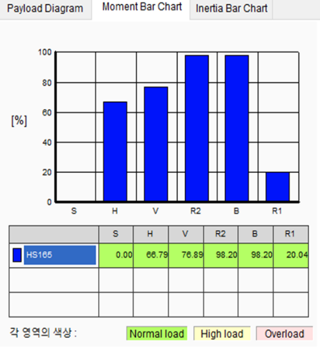
- 扭矩值在公差范围内
- 超过惯量公差(使用时会缩短相关轴的寿命)
缩短长度时
- 刀具重量保持不变,但 z 轴到刀具中心的距离缩短了 100 mm。
- HRLoad 分析
- 重量在容许范围内(在边界上)
- 扭矩值在公差范围内
- 可用于惯量公差高负载(相应轴的寿命会缩短,但优于1)。